One thing I didn’t realize when I set about grafting the ARC ONE system onto my Carrera Go!!! track was that the controllers only had two wires, and thus no motor braking would be possible. The track is so short, and the turns so tight, you really do need the brakes, especially if the car has no magnets.
After a little searching, I found that these controllers could be purchased new for about 6 bucks. Cracking one open to see what it would take to add a braking contact and wire seemed pretty low risk.
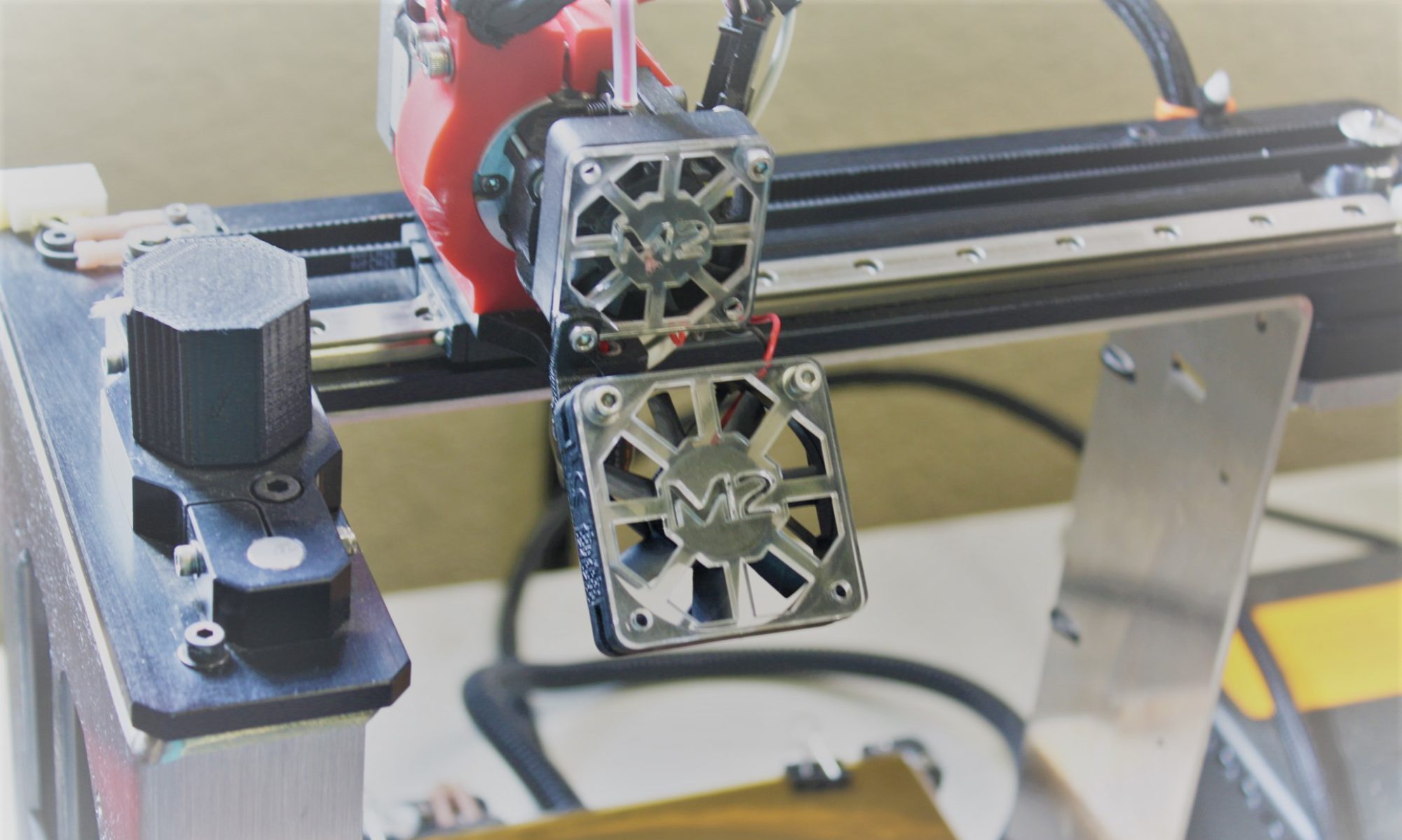
Behold, a pretty basic wire wound resistor controller.
When the trigger is in the released position, it is held against a plastic stop that contacts the copper wiper. This is exactly what I was hoping for. Adding the brake contact could be accomplished by adding a piece of metal between the wiper and the stop, and running the wire out.
A quick measurement of the stop indicated a piece of 5mm OD brass tube could be cut to length and put into place.
In order to get a good bond via super glue, I crushed the tube down a bit.
Slip over stopper and add glue:
I opened up the exit from the handle to make sure the wires weren’t being crushed.
Reassemble, and add whatever connector to the new wire you are comfortable with. I like Anderson PowerPole connectors, although I haven’t totally decided how I’m going to implement these extra connections. This wire just needs to be connected to the ground on the low voltage DC side of the track set.
The only hang up I hit was that the two controllers I received were wired opposite of one another. In normal operation, it doesn’t matter where the two wires connect to inside the controller. One just needs to be on the wiper and the other on the resistor. However, once you want to ground the wiper, it suddenly matters which has 15Volts and which is just running out to the motor. You want the 15 Volt wire going to the resistor, and you want the other wire on the trigger/wiper. By luck, the first controller was wired as desired, and everything worked. I didn’t bother checking the second controller, and of course it was different. When I hooked everything up, the ARC ONE browned out, as the power supply was shorted to ground. So, I had to open the second controller back up and swap the wires in the handle. They are just attached with screws through eyelets, so this isn’t difficult.
I now have a completely functioning analog system with brakes along with computer timing and scoring for $40.
The original build of the End Raceway utilized a scratch built Arduino based timing system that I had constructed for a previous track. The initial build used stock Carrera Go thumb style controllers, which meant that the track was still set up for the “boost” feature. I was also still using the stock power supply and power base, which meant the current to the cars was limited to a very tiny amount (less than 0.1 Amps).
I began looking for solutions, and hatched a plan to scratch build a track power box, with independent lane voltages, drivers stations with call buttons, and TruSpeed PWM controllers. I even started acquiring some of the odds and ends. The plan was to have this box hang off the side of the track, and it would just be unplugged from the track and carried separately for transport. I had also continued to improve the software in my timing system box, and had a list of additional features to add (start lights, louder buzzer, etc).
For different reasons, I started looking at the Scalextric ARC offerings, and stumbled across the ARC ONE system. Adjustable sensitivity wired controllers, two sets of in slot IR sensors per lane, and of course Bluetooth connectivity and an app for timing and scoring seemed like a pretty incredible feature list for under $40. The only hurdle would be grafting that hardware onto a piece of Carrera Go track. What could go wrong?
The track and track table weren’t designed with this in mind. In order to fit the control box inside the frame of the table, it will have to be mounted separately from the track piece. Removing the screws from the bottom of the ARC ONE base separates the control from the track. There were also a few pieces of tape in there holding the wires in place.
I want to be able to connect and disconnect the control box from the track, so I cut out a pretty large access opening in the back of the housing:
Of course, the lane spacing is narrower on Carrera Go track than Scalextric 1/32 track. So, the PCBs holding the sensors had to be modified. I took a few measurements and concluded I needed to remove a little over 0.813″ of width. I used a metal cutting disc on a Dremel to make the cuts.
In order to reconnect the two halves, first I used a piece of duct tape to hold the two parts in the correct position relative to each other. Then, I flipped the board to have the green side up. I had to put some cocktail toothpicks underneath to support the board (instead of the IR sensors).
I used a small bit of sandpaper to remove the “green” coating on that side of the board, in just the areas I wanted to solder jumper wires. The copper layer is very thin so don’t get to heavy handed here. For the pieces of wire, I used individual strands from some stranded 22 gauge wire I had on hand.
One side is complete in the picture above. The other side complete in the picture below:
From here, I put a layer of thin CA glue all over the exposed PCB and the wires/soldering. This should provide a basic level of moisture protection. Then, I mixed up some two part epoxy and encased the whole area.
Because I intended to mount the control box a bit separated from the sensors, I spliced in 6″ extensions into all of the wires. The picture below shows one sensor wire completed with the loose wires ready to go into the other.
Next, I chose to do the cutting on the plastic track pieces. I went ahead and removed the metal rails and made the cuts on the plastic first. Then, made the cuts on the rails with them loose. I don’t know if this was necessary, but it made all of the cutting feel more controlled. I just used a drill to make some starting holes, then used a spiral upcut bit on the Dremel to hog out the rest. Not terribly pretty, but it came out okay in the end.
A reference view of the backside shown below:
Loose rails ready to be cut:
I checked the fit a few times as I was cutting.
Sensors in Place:
Sensors in place, another view. My handywork with the Dremel wasn’t great, but hopefully I’ll be able to fill/hide some of this later.
I had to extend the power wires as well. I just soldered them directly to the track. I’ve done this several times and never had an issue.
Here is how things sit right now, I have the control box just sort of hanging, and have been experimenting with the App side of things. I intend to mount the control with the connectors pointing straight up (perpendicular to the race surface) near where the wires are laying across the table top. This way, the module doesn’t overhang the table and will be protected in transit.
Once I finish up the installation, I’ll post some “final” pictures, but this was far enough along I thought I would share.
This is a pretty “low buck” option to upgrade a Carrera Go!!! track with reasonably performing Timing and Scoring. I will say, the hardware is really let down by the software/app side of things. The Scalextric ARC app is completely unusable. The Magic app is functional, but I haven’t figured out some of the quirks yet. It is just a shame that it has to be that way, as I think this system had a lot of potential to engage a younger crowd and perhaps people new to slot car racing in general.
My initial design for wheels and tires had many problems. In order to reduce the number of parts, my original plan was to thread the axles themselves and screw the wheels on to the axle. I purchased left hand thread and right hand thread dies to do this.
I practice,, threading the axles tended to bend them, or at a minimum make them less straight. Of course this is a problem. I also had a lot of trouble with marring the axles trying to hold them while putting on the threads. I did get a test car put together this way, but one of the sources of vibration in the car was clearly the bent axle.
The final issue I discovered was that since you are counting on the wheels to help set the gear mesh, the fact that the wheels are getting “tightened” onto the axle while running causes binding.
My initial tire design was based on the tires on Carrera Go cars. The wheel has a “rib” around the middle and the tires have small “flanges” that fill that rib. The intent of this geometry is to keep the tire on the wheel in the turns.
These small side flanges are difficult to cast in a silicone mold. It can be done, but it isn’t as easy as I would like. The undercut in the mold is severe, making filling the flange and removing the tire both difficult. mold life was a bit of an issue.
After working through the Dodge Monaco, I decided to refocus the project on making a no-mag car that could be FDM printed and would actually be fast. I also set out the goal of coming up with something that could be made for a total cost of about $4 (excluding decals and paint). Obviously, you need a little bit of economy of scale to get the per unit cost down to $4. However, if you were making 20 or 30 of these, I believe you could get down to around this price point.
I’ve always liked the Group C JaguarXJR-9. I decided if I was going to make a custom car, it would have to be one of these.
With this price point in mind, and based on the issues I had with the King Crown Gears in the Monaco, I redesigned the chassis and drivetrain around 2mm components. This allowed me to get ball bearings very inexpensively, as well as allowed me to use crown gears that I can buy in bulk in China for a few cents each.
This is the very first version of the chassis. The axles are both 2mm shaft. You can see the wheels have a wide deep recess in the middle (where the setscrews are).
The frame and body have provisions for 4 screws. I typically just use two on the diagonal to secure the body (with a little bit of rattle).
This version still has de-soldering braid for the pickups and screws to secure. I ditched this in the next iteration and just run the motor wires through the guide flag. Here is the fully assembled chassis. I added several mount points to the rails to allow attaching magnets and lead weights. The loose pieces next to the car are plastic versions of the lead weights (just to check space claim/fit)
The magnet that is in the middle of the car works really well. It provides enough extra downforce to mask a lot of performance problems. I tried finding a way to tuck a pair of very small magnets towards the rear of the car (they are near the crown gear). There just wasn’t room to tuck them in.
I entered a pair of these cars into a Pro No-Mag proxy race. They ended up getting a DNQ primarily because I didn’t clue the tires to the wheels. The track they were on in the proxy race is much larger (and much faster) than my home track. Issues with the tires coming off the wheels didn’t show up in my testing.
Stickers on the Jaguar were from a 1/43 model kit. Paint and stickers really bring things to life. The other paint scheme is my personal paint scheme I use on all of my cars. I guess that makes it a fantasy livery.
All of the stl’s as well as a text file with sourcing information and other tips and tricks can be found here:
I have done a lot of work on wheels and tires since I made these cars. Stay tuned, as I plan on writing up something on what I believe to be the best overall strategy for making wheels and tires.
For a while now, I’ve been working on a project I’ve been calling the Open Slot Car. This project really began as a response to the terrible quality of Carrera Go!!! slot cars. I purchased a Carrera Go set for my son and I to play with a few years ago, and while the track system is quite nice, the cars themselves had many problems. Also, in general, there is much less selection of cars in 1/43 scale than in other scales.
So, I thought it would be fun to design a 3D printable chassis and bodies to enable people to build cars that run better than the Go cars, and be inexpensive to make.
The first car I wanted was a 1974 Dodge Monaco. I found some dimensions and pictures from the internet and set about creating this iconic car.
I learned many things in the design of this car. Number one is that modelling car bodies in regular MCAD is quite difficult. Number two, is that you have to be really careful with how you set up the models so that you can shell them out in order to keep the weight down.
Here is a body off shot. I tested many ideas about flag/pickup design as well as evaluated different options for the front axle. This initial flag design didn’t work very well.
I started off using de-soldering braid I had ordered from McMaster. I ordered braid with no-flux, per the suggestions of others. I thought the little screws pinning them in place was a good idea, but the screws ended up damaging the braid, and I had trouble getting a reliable connection.
For this first iteration, I tried to use as many “commonly available” slot racing parts from other scales as I could. The smallest Parma King Crown Gear I could find was still a bit to tall for what I was trying to do here. That also drove me to use 1/8″ axles, bearings, etc. I had a lot of trouble with the gear “high centering” the car on the track when in motion, causing terrible handling.
You can also see that this car uses a 130 can motor. These are so inexpensive and so common, I really wanted to make these work. However, after trying several different motors, I concluded that for 1/43 scale it is worth the trouble to track down a smaller 030 can motor.
I went into this project with the intent of making my own tires. I wanted a wheel/tire design that would make it easy to change/replace tires (no glue required). I also wanted the tires to be easy to cast. The Wheel/Tire geometry I came up with met those goals to a point. On home track, at relatively low voltages and speeds they work fine. If you take care in the process of mold making, you can produce wheels and tires that don’t require a truer (at least for low speeds and home track use). however, in the end I’ve concluded you really need a tire truer to get any real performance out of these parts. The FDM printed wheels are a little rough, the tires are a little rough, and the truer does a lot to correct these issues. I also tested two different hardness of Urethane, with the softer 20 shore being a clear winner.
If you’ve read this far, you should also be aware that I decided early on that I wanted to be able to run with no-magnet. I did design and test a few different magnets and holders on this chassis. Indeed, adding enough magnet would make it run, but I prefer no-mag racing and wanted to find a way to sort an FEM printed car to the point it could run with no magnet.
This car ended up not running very well for a variety of reasons. However, I used this car to test many different materials/parts/concepts and it served its purpose quite well. I still don’t have a 1974 Dodge Monaco in my fleet, but that day may be coming soon.
I decided I wanted to utilize the latest batch of Urethane I purchased and try to cover myself for tires for the foreseeable future. The conclusion of my previous work with silicone molds left me with the conclusion that the process is too slow, and that running across a tire truer is unavoidable.
With that in mind, I decided to make 3D printed molds. The question then is, what sizes make sense? My focus is 1/43 scale cars. The smallest crown gear I have found is a 20 tooth gear, with an OD of around 10 mm. A minimum practical clearance for the gear is about 1 to 1.5 mm. So, the smallest tire it makes sense to use is about 13mm. This translates to a rolling diameter of about 22 inches. This is a bit larger than some cars would really run, but it is what it is. The largest tire diameter that is common in road racing that I could find has about a 28″ rolling diameter (NASCAR). 24″ rolling diameter tires show up on sports cars with some regularity. So, this narrows down to 22″, 24″, and 28″ tires. Of course, you could always true a larger tire down to something smaller.
From the standpoint of wheels, the smallest relevant wheel I can find is a 10 inch diameter. This is impractical at 1/43 scale for production on a home FDM printer (at least for my wheel design which uses a setscrew). The smallest wheel I can make translates to about a 13″ wheel in full scale. 14″, 15″, 16″ and 18″ wheels are all relatively common. At 1/43 scale, 15″ and 16″ wheels are only different by about 0.5mm. I’ve rationalized wheel diameters down to 3, translating to 13″, 15/16″, and 18″.
Depending on the era, tire widths change substantially. The tires on a vintage Mini Cooper would scale down to just 3mm wide. The tires on a new Corvette scale down to around 5mm width. I rationalized common tire widths down to 3mm, 5mm, and 6mm.
At this point, I took a step back. This was going to turn into a whole bunch of different molds. Overall, I think I’ve come up with a good solution.
I’ve been quietly plugging away on making wheels and tires lately, and have some thoughts/progress to share.
The very first 3DP slot car I build used printed wheels with “conventional” fitted tires. The wheel had a raised “center” and the tires had overhangs for the sidewalls. This is similar to how most RTR wheels and tires work.
Indeed, these were the very first tires I tried casting in Urethane. I went about it similar to the way one makes copies of an existing tire. I printed in PLA the tires, glued them to the bottom of a cup, and poured Silicone on them to make a mold.
The green mold, with what looks like a tractor tire form in it is one of my early test molds.
I printed a simple cup that I could glue positives into the bottom of, using a regular glue stick.
This technique works very well, and it is possible to yield a dozen or more runs of a given mold, depending on how thin the sections are and aggressive the overhangs.
There are downsides though. If you are wanting to iterate, and try a bunch of differnet things, the cost of the silicone adds up fast. The additionalsteps and curing of the silicone take a bunch of time. Each cycle takes a couple of days to run through.
The shelf life of the Urethane is quite short after you open the two parts. It reallly is a use it or loose it situation. To date, I’ve thrown out 80% of the Urethane I’ve purchased because it has gone bad before I can use it. I’ve had good luck storing unused Silicone however.
I redesigned the OpenSlotCar wheel to have a large tapered recess in the center of the wheel. This means the tire has a large ridge in the center, going into the wheel. ALl of the cross sections are relatively thick, and this shape is easy to cast. The rib keeps the tire on the wheel. A pair of wheels of this geometry are shown (printed in grey). Positives for tires are shown, printed in yellow and a translucent grey. The red tires in the background are finished Urethane tires.
Originally, I was hoping to produce a tire that wouldn’t need to go across a tire truer to be usable on a car. I was also trying to avoid gluing the tires to the wheels.
With regards to the tire truer, it ended up being unavoidable. There are so many irregularities in the printed wheels and the cast tires, the truer is needed to hide al the sins.
On my small home track, I was able to run fine without gluing the tires. However, in the proxy race that I sent the car to, the higher voltages and speeds showed that there is no way around gluing the tires!
I highly recommend joining a proxy race. It is a great experience, and you’ll learn a lot getting direct feedback from the guys who run the races. Here’s the full write up on the proxy race I took my lumps in this year:
I’ve been working on and off on my 3D Printed “OpenSlotCar” design for a while now. I have two areas that I want to improve before I turn the files loose. One of them is the setscrew wheels (the other is the process for molding the tires).
I had a bit of a break through on the wheels that I’m quite happy with.
The original wheels were just 3D printed with a “cross drilled” hole for a set screw. I advised threading the hole with a tap to reduce the risk of stripping the plastic out with the setscrew.
These wheels worked okay, but could only be tightened and loosened around a dozen times at most before the plastic gave up. It was also difficult to get them tight enough not to slip but not strip them.
The solution I came up with is very simple, and I believe would be useful for many other 3D printed couplings. Essentially, I took the wheel model and added a pocket that was sized to press fit a piece of 6mm OD brass tubing. I pressed the tubing in, then cross drilled it with a drill and tapped the combined plastic/brass hole.
This hoop of brass gives the screw a sliver of metal to grab onto and yields a much stronger joint than just the plastic threads.
Step 1: cut the tubing to length.Step 2: Hammer the piece of tubing into placeStep 3: Put the wheel in a viceStep 4: Drill out the holeStep 5: Tap the threads. I’m using M3 setscrews, so an M3x0.5 tap.Step 6: Wheels fitted to a scrap of 2mm OD shaft.
This system provides a connection that can be really tightened down hard with a hex driver and grips the axle hard enough that it is very difficult to twist or pull the wheel straight off with your hands.
I like the things I build to have robust connection points. In other projects, I’ve come up with small 3D printable pieces that allow me to “panel mount” Anderson PowerPole connectors as well as 5.5 mm barrel jacks. I reused these concepts here. I use three powerpole connectors for my controller wiring.
In order to give them something solid to be attached to, i framed the foam track with 1/16″ thick 1″ leg angle aluminum. I used Gorilla Glue to attach the aluminum to the foam.
I used a power drill and some files to create the square hole for the barrel jack to protrude through. I also made a little template to make it easy to drill the pair of mounting holes.
I didn’t want the aluminum to be directly in contact with the surface it might be sitting on, so I made 3D printed plastic corner pieces to cover up the corners.
To complete the project, I put a bead of grey caulk around the top edge of the aluminum and foam to fill the gap. I also purchased these variable voltage power supplies from Aliexpress, so it is easy to change the track voltage.
I’m using standard adhesive backed copper tape for the rails. I did order the tape with conductive adhesive, and I can report that indeed this stuff works very well.
The testbed oval track used 1/4″ wide tape. There was a lot of pleating and wrinkling in the turns, even though they were a pretty large radius. I asked some questions on the forums and had a very helpful discussion with Ed “HO RacePro” who suggested going to thinner tape. So, for the proof of concept track, i ordered 1/8″ wide tape.
There were a few difficulties. The tape applying tool I found on thingiverse worked quite well with the 1/4″ tape. It didn’t work as well with the thinner tape. The OD of the retainer was smaller than the OD of the roll itself, so the roll wanted to unspool over the sides. i ended up applying the tape by hand, which was tedious.
This is a still shot from a video I took of a car running. At this point, I just had the rails hooked up to a power supply.
The crossover took a little thinking, and in hindsight i wish I would have planned it a bit better.
I just drilled holes through the foam with a 5/32 drill bit and ran the tape to the underside of the foam to make connections. Most connections are just the tape stuck to itself. I did solder wires onto the tape where i would need to make connections to the power supply and controller.